一、會議時間:2021年7月3日
二、會議地點:西北工業大學翱翔國際會議中心-創新大廈B座,5樓翱翔廳
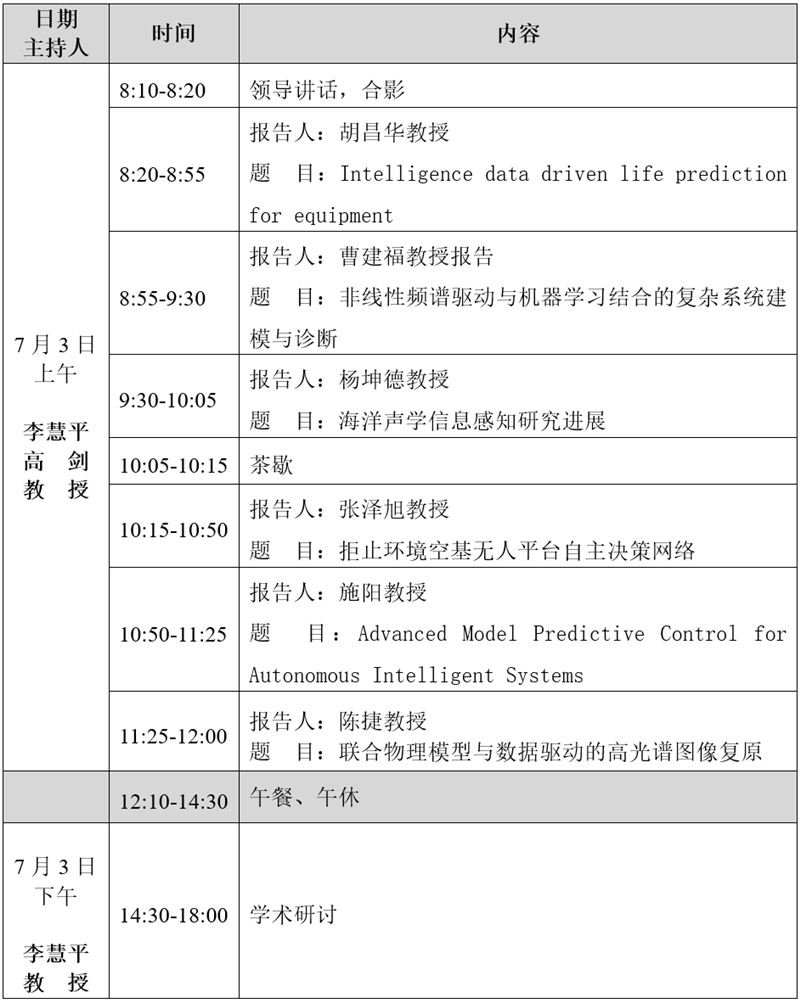
三、會議日程
四、報告內容及專家介紹
報告內容簡介
Reliable Control Technology of Equipment Life Cycle
Reliability design, reliability analysis and reliability experiment, fault-tolerant control, fault diagnosis, fault prognosis, residual useful life prediction,predictive maintenance and health management, all of these reliable control technology are discussed systematically in this report.
專家簡介

胡昌華,導航制導與控制國家重點學科帶頭人、測試與控制技術國家虛擬仿真中心主任,國家杰出青年科學基金獲得者,國家教學名師,教育部自動化類教學指導委員會委員,中國自動化學會常務理事、技術過程故障診斷與安全性委員會副主任,陜西省自動化學會副理事長,主要研究自動測試與制導、故障診斷與壽命預測等,出版專著7部、教材一部,一部教材入選國家規劃教材,發表論文300余篇,SCI收錄62篇,SCI他引1268次,獲國家科技進步二等獎1項,省部級科技進步一、二等獎9項,當選全國優秀科技工作者,新世紀百千萬人才國家級人選、國家有突出貢獻的中青年專家,中國科協“求是”杰出青年實用工程獎,中國科協八大代表,享受政府特殊津貼專家。
報告內容簡介
結合數據驅動與深度學習算法的非線性系統建模與故障診斷
機器人、飛行器、數控裝備等各類復雜機電系統,通常是屬于非線性系統,對非線性系統建模與故障診斷研究具有非常重要的理論和工程價值。數據驅動、機器學習方法是國際上的熱門研究方向,特別是深度學習算法被學術界普遍關注。然而在建模與診斷問題方面,由于復雜機電系統自身的物理與非線性動態特性,單純的機器學習算法有較大的局限性,很難在實際系統中成功應用。本報告將以機器人、數控機床、航空發動機等復雜系統為應用背景,重點討論結合數據驅動與機器學習算法的非線性系統建模與診斷算法,同時介紹研究團隊在智能機器人及數控機床故障診斷方面的研究成果。
專家簡介

曹建福,教授/博導,陜西省自動化學會副理事長兼秘書長。現任西安交通大學自動控制研究所所長,兼任陜西省自動化學會副理事長兼秘書長,中國自動化學會理事,中國自動化學會建筑機器人專業委員會主任委員。西安交通大學計算機專業本科畢業、系統工程專業碩士和博士畢業。主要從事機器人控制、復雜系統控制與診斷、智能制造等方向研究。入選江蘇省“333”高層次人才工程第二層次,曾為某部屬大型研究所工程師,主持國家“75”科技攻關、國家自然科學基金、重點研發計劃等國家及省級課題40多項;獲省部級以上科技獎勵5項,其中獲1項國家科技進步二等獎(排名第2)。
報告內容簡介
海洋聲學信息感知研究進展
闡述深海傳播建模與特性、海洋噪聲建模與特性、海洋聲場相關特性、海洋聲場干涉特性、深海水下聲源定位理論與技術、深遠海聲學科學考察的進展等。
專家簡介

楊坤德,西北工業大學航海學院教授,博士生導師。現任西北工業大學航海學院副院長、“海洋聲學信息感知”首批工信部重點實驗室主任、國家級重點實驗室副主任。長期從事海洋聲學、水聲信號與信息處理、海上信息傳輸等方面的研究。先后主持國家自然科學基金、國家重大專項、探索一代重大創新、重點預研等課題30余項,擔任國家重大專項海洋聲學調查航次技術首席7次。獲國家技術發明二等獎(排第1)與省部級科技獎7項,發表SCI論文130余篇,授權專利60余項,出版專著教材6部。被授予“國家級科技創新領軍人才”、“卓越青年人才”、“科技部中青年科技創新領軍人才”、“教育部新世紀優秀人才”、“陜西省優秀青年科技新星”等榮譽稱號,獲國務院政府特殊津貼。
報告內容簡介
拒止環境空基無人平臺自主決策網絡
未來ZZ加速向“三化融合”的智能化ZZ轉變,分布式自主化的ZZ編隊與集群將是未來裝備的重要形態之一,智慧智能的力量體系逐步成形,諸多小編隊小集群的自適應融合作戰成為重要的ZZ組織方式。
提出仿生“蠅群”的高不確定性空基無人平臺自主襲擾/攻擊系統,創建“招之即來,揮之不去”的高不確定性空基無人平臺自主協同決策網絡,執行對惡意目標抵近、對峙、糾纏與攻擊。探索弱社會性群體智能與非自覺性群體協同科學問題,建立“廣域泛在+任務智能”為特征的網絡信息體系,實現從物理域、信息域到知識域的拓展,增強從感知到適變的網絡智能,對物理打擊、電磁干擾和網絡攻擊做出適變響應,對環境態勢進行不同顆粒度等級的感知,并依據任務優先級迅速做出決策。
專家簡介

張澤旭,教授/博士生導師,哈爾濱工業大學飛行器動力學與控制研究所所長,航天學院院長助理。某重大項目技術首席,國家重大科技專項“空間在軌服務與維護”論證專家,載人月球探測論證專家。中國空間科學學會常務理事,中國空間科學學會空間智能專業委員會主任,中國指控學會指揮與控制網絡專業委員會委員。
長期從事無人集群智能協同感知與自主決策、飛行器自主導航與控制、數據可視化應用等方面的研究。出版專著1部,發表學術論文60余篇,獲國家發明專利12項,獲省部級科技進步二等獎1項。主持國家自然科學基金、863項目、預研課題等課題10余項,培養研究生60余名。
報告內容簡介
Advanced Model Predictive Control (MPC) Framework for Autonomous Intelligent Systems
Autonomous intelligent systems, which lie at the intersection of unmanned systems, robotics, systems and control, multi-agent systems, networked and distributed systems, machine learning, etc. Autonomous intelligent systems are equipped with abilities such as sensing and perception, data processing and information fusion, intelligent decision making, autonomous control, learning and adaption, communications and computation, thus can achieve a high level of autonomy to perform missions without human intervention or can naturally interact and collaborate with humans and/or environment. The fundamental control theory and methods in autonomous intelligent systems are of central importance in orchestrating all related functions. Autonomous control and intelligence can be applied to various systems, e.g., aerial vehicles, marine vehicles, ground robots, space exploration, energy and power systems, transportation and smart city, intelligent agriculture, smart manufacturing, smart health care systems, Internet of Things, etc. Model predictive control (MPC) is a promising paradigm for high-performance and cost-effective control of autonomous intelligent systems. This talk will firstly summarize the major application requirements and challenges to innovate in designing, implementing, deploying and operating autonomous intelligent systems. Further, the robust MPC and distributed MPC design framework will be presented. Finally, the application of MPC algorithms to various autonomous intelligent systems will be illustrated.
專家簡介

施陽,加拿大維多利亞大學教授,Fellow of Engineering Institute of Canada (加拿大工程研究院), IEEE Fellow, ASME Fellow和CSME Fellow。1994年和1998年在西工大航海學院獲得學士和博士學位;2005年于加拿大阿爾伯塔大學獲得電子與計算機工程博士學位。2005-2009在加拿大薩斯喀徹溫大學任助理教授及副教授;目前為加拿大維多利亞大學機械工程系終身教授。 施陽博士的研究集中于工業信息物理系統、網絡及分布式控制系統、模型預測控制、機電系統及機器人系統設計與控制、能源系統的優化調度與控制等。2007獲得加拿大薩斯喀徹溫大學十佳教學獎;2012年獲得維多利亞大學工學院最佳教學獎。2015年獲得維多利亞大學年度唯一的最佳研究銀獎(Craigdarroch Silver Medal);2013年獲得日本學術振興會特邀訪問教授獎;2017年獲得德國洪堡研究基金。他與學生合著的論文獲得2017年IEEE Transactions on Fuzzy Systems年度最佳論文獎。目前任IEEE工業電子學會工業信息物理系統技術委員會主席,擔任IEEE Transactions on Industrial Electronics的共同主編(Co-Editor-in-Chief),任多家國際期刊的副編輯,包括:Automatica, IEEE Transactions on Control Systems Technology, IEEE Transactions on Cybernetics, IEEE/ASME Transactions on Mechatronics。
報告內容簡介
聯合數學優化與深度學習的高光譜圖像復原研究
高光譜圖像由于其圖譜合一的特點,在遙感、農業、工業領域具有廣泛的應用,然而其在成像過程中存在不同的圖像質量退化過程:基于數學優化的方法可以根據圖像退化的物理模型,靈活地處理不同的復原問題, 但通常需人工定義恰當的圖像先驗知識,且復雜先驗常會帶來較大的求解難度;基于深度學習的方法采用數據驅動的方式,能較好地挖掘圖像特性,當訓練和測試數據特性匹配時能夠獲得優異處理結果,但是當前深度神經網絡參數多、可解釋性低、導致這類方法泛化能力有限。因此,從物理模型和數據驅動兩方面綜合入手,研究數學優化和深度學習的有機聯合,實現精確高效的高光譜圖像復原算法,具有重要的理論意義和實際價值。
專家簡介

陳捷,西北工業大學教授、博導、國家級青年人才。2009年獲得法國特魯瓦工程技術大學博士,先后在法國尼斯大學、美國密歇根大學從事研究工作。主要從事智能信息處理、圖像處理、聲信號處理領域內的研究共走。2016年作為技術委員會主席舉辦國際聲信號增強會議,2018年獲得亞太信號與信息處理協會 “杰出講師” 稱號,2019年作為主席舉辦IEEE信號處理協會智能信號與信息處理暑期學校,2020年獲得IEEE VCIP大會近紅外圖像處理大賽冠軍,2022年將作為主席舉辦IEEE機器學習與信號處理國際大會。
(審稿:楊坤德)




